

مهندسان حوزه رباتیک یک دست رباتی چالاک و ماهر جدید طراحی کردهاند که بدون نیاز به دوربین و دادههای تصویری و صرفا بر اساس حسگری لامسهای وظایف مبتنی بر دستورزی را به انجام میرساند.
به گزارش «تک اکسپلور»، در این خصوص فکر کنید که با دستان خود چه کارهایی میکنید زمانی که شب در خانه هستید و دکمه کنترل از راه دور تلویزیون را فشار میدهید، این قبیل مهارتها بر پایه لمس کردن استوار هستند. در این حال محققان حوزه رباتیک از مدتها پیش در تلاش بودهاند تا مهارت و زبردستی «حقیقی» را در دستهای رباتی ایجاد کنند اما موفقیت زیادی در تحقق این هدف به دست نیامده است.
رباتها میتوانند اقلامی را بگیرند و جایی بگذارند اما وظیفههای زبردستانهتر مانند تجمیعکردن و بازآراییکردن یا بستهبندی کردن در حوزه قلمرو دستکاریهای انسان باقی مانده است. با این حال پیشرفتهای به دست آمده در حوزه فناوریهای حسگری و تکنیکهای یادگیری ماشین برای پردازش دادههای حسی، حوزه دستکاریهای رباتیک به سرعت در حال تغییر است.
دست رباتی چالاک قادر به کار کردن حتی در تاریکی است
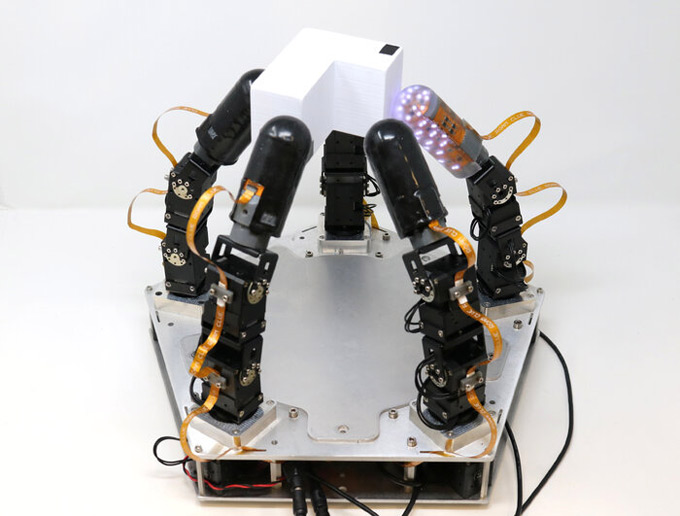
محققان در دانشکده مهندسی دانشگاه کلمبیا یک دست رباتی بسیار ماهر و چالاک را عرضه و معرفی کردهاند که حس لامسه پیشرفته را با الگوریتمهای یادگیری موتور (حرکتی) ترکیب میکند تا از این طریق به سطح بالایی از چالاکی و زبردستی برسد.
این تیم تحقیقاتی به عنوان آزمایش دشواری کار با دست رباتیک یک وظیفه دستورزی دشوار را انتخاب کرد؛ به چرخش درآوردن یک شئ با سطح ناصاف با نگه داشتن آن در دست در عین باثبات نگه داشتن آن. این کار بسیار دشواری است زیرا مستلزم تغییر وضعیت مداوم انگشتان است. نه تنها دست رباتیک موفق به انجام این وظیفه شد بلکه این کار را بدون هرگونه بازخورد یا فیدبک بصری و صرفا بر اساس حسگری لامسهای انجام داد.
این دست رباتیک علاوه بر رسیدن به سطوح جدیدی از چالاکی و مهارت، بدون هرگونه دوربین خارجی کار میکند. اتکا نکردن این دست رباتیک به بینایی برای دستورزی با اشیاء به این معنی است که میتواند کارهای خود را در شرایطی با نور نامناسب و حتی در تاریکی انجام دهد.
محققان این دست رباتیک را با پنج انگشت و ۱۵ مفصل طراحی کردهاند که هر کدام بطور مستقل قابل حرکت دادن بوده و هر کدام از انگشتان به فناوری حسگری لامسهای مجهز هستند. گام بعدی آزمایش توانایی این دست لامسهای برای اجرای وظایف دستورزی پیچیده بود. آنها برای انجام این کار روشهای جدیدی برای یادگیری موتور یا توانایی ربات جهت یادگیری وظایف فیزیکی جدید مورد استفاده قرار دادند. آنها بطور خاص از یک روش موسوم به «یادگیری تقویتی عمیق» استفاده کردند که با الگوریتمهای جدید تقویت شده است.




